
科普 | 為什么低軌衛(wèi)星地面終端不能使用機械伺服天線?
為什么低軌衛(wèi)星地面終端不能使用機械伺服天線?
在低軌衛(wèi)星通信系統(tǒng)(如Starlink、OneWeb等)中,幾乎所有地面終端都采用了有源相控陣天線。相較之下,傳統(tǒng)機械伺服拋物面天線雖然技術成熟、成本低廉,卻幾乎沒有應用在低軌衛(wèi)星終端上的。
大家會直觀地認為:“低軌衛(wèi)星飛得太快,機械伺服系統(tǒng)跟不上。”其實這話并不全面。
這篇文章,我們將從角速度、衛(wèi)星切換頻率、系統(tǒng)壽命和可靠性等角度出發(fā),分析一下機械伺服天線不能用于低軌衛(wèi)星終端的工程方面的原因。
一、從軌道參數(shù)計算角速度與角加速度
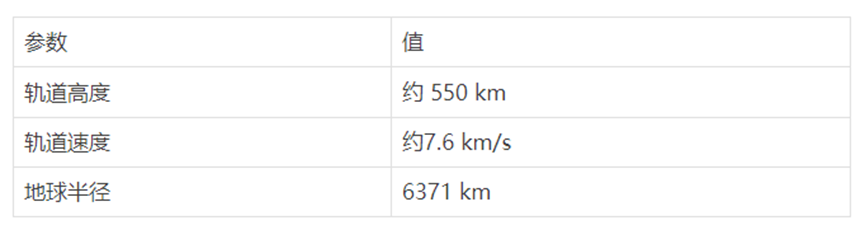
1. 衛(wèi)星軌道基礎參數(shù)
以Starlink衛(wèi)星為例:
2. 最大角速度的計算
衛(wèi)星過頂時,地面天線所需跟蹤的角速度最大。此時,衛(wèi)星在天線視野的切向速度最大,距離最短。
此時以地面天線為視角的衛(wèi)星的最大角速度公式:

其中:
? ω_max 是衛(wèi)星的最大角速度,單位是弧度/秒 。
? v 是衛(wèi)星的軌道速度 (7600 m/s)。
? h 是衛(wèi)星的軌道高度 (550,000 m)。
計算結果:

由此可見,從地面站看來,低軌衛(wèi)星的最大角速度僅為 0.79度/秒。
一般來說,機械伺服能夠支持的運動角速度遠遠超過衛(wèi)星最大角速度。下面是某機載拋物面天線伺服跟蹤系統(tǒng)的技術指標:

這表明,機械伺服系統(tǒng)在理論上完全可以覆蓋加速度的動態(tài)范圍。
二、機械伺服天線無法適應低軌衛(wèi)星的根本原因
盡管角速度在機械系統(tǒng)的能力范圍內(nèi),但是Starlink(以及所有其他低軌星座)的地面終端幾乎沒有使用機械伺服天線的。原因是機械伺服天線在低軌衛(wèi)星跟蹤中存在幾個無法解決的核心問題。
問題1:衛(wèi)星切換頻率過高 → 機械跟蹤系統(tǒng)存在劇烈切換
與GEO衛(wèi)星不同,低軌衛(wèi)星繞地球運行周期非常短(約90分鐘),每個地面終端僅能穩(wěn)定連接衛(wèi)星3~15分鐘,隨后就需切換至下一顆衛(wèi)星。
實測Starlink終端切換間隔:

為了保持通信連續(xù),每幾分鐘就可能發(fā)生一次星間切換。對于機械伺服天線來說,這意味著:
天線剛開始一直跟蹤衛(wèi)星A,等到需要進行星間切換的時候,伺服結構需要把天線面“瞬時暴力”調(diào)整幾十度,轉到衛(wèi)星B的方向,對跟蹤衛(wèi)星B。
機械伺服機構需要每隔幾分鐘時間就完成一次跨越幾十度的暴力運動流程。這種暴力運動將對電機的瞬時扭矩、齒輪的強度和整個結構帶來巨大的沖擊。
任何機械伺服結構都存在慣性和延時,當需要改變速度時,伺服系統(tǒng)接收指令、電機響應、齒輪傳動都需要時間。這種延遲會導致出現(xiàn)一個“跟蹤誤差”,即天線總是稍微落后于衛(wèi)星的真實位置,在低軌衛(wèi)星跟蹤中,這種不可避免的響應延遲,導致信號丟失、中斷,嚴重損害用戶體驗。
問題2:頻繁變速跟蹤 → 對伺服控制復雜度極高
低軌衛(wèi)星的角速度不是恒定的:
? 在地平線附近角速度較慢,
? 天頂時最快(0.063°/s),
? 再次下降時需減速、反向加速。
這意味著伺服系統(tǒng)必須實時根據(jù)衛(wèi)星位置調(diào)整運動加速度和速度:電機和機械伺服結構必須在衛(wèi)星過境的短短幾分鐘內(nèi),完成一個“加速 → 減速 → 到天頂時加速度為零 → 反向加速 → 反向減速”的變化過程。
這種持續(xù)的變速運動,將對齒輪、軸承和電機造成指數(shù)級增加的磨損。另外為了實現(xiàn)這種平滑的變速控制,電子控制系統(tǒng)必須精確控制電機扭矩曲線、加減速策略,對伺服算法提出極高要求。
問題3:天頂盲區(qū) → 機械天線無法實現(xiàn)快速方位掉頭
當衛(wèi)星過頂時,
? 俯仰角從0°→90°→0°平滑變化
? 在過頂?shù)乃查g,方位角需要變化180°,此時角速度要求理論上是無窮大,這在物理上是不可能完成的動作。
機械伺服系統(tǒng)在天線正對天頂時出現(xiàn)的“方位角掉頭”的難題,也就是業(yè)內(nèi)常說的“二維機械伺服天線的過頂問題”,
對于高軌衛(wèi)星終端天線來說,一般是在赤道附近的地面終端才會面臨這個問題。而對于低軌衛(wèi)星終端天線來說,會一直的、頻繁的遇到這個問題。
過頂問題或者天頂盲區(qū)問題會導致導致信號中斷、重新捕獲時間過長,影響通信穩(wěn)定,嚴重影響用戶體驗。
問題4:可靠性與維護成本 → 機械系統(tǒng)不適于消費級終端
Starlink等系統(tǒng)的地面終端設計目標是消費級的電子產(chǎn)品,設備需要在惡劣的室外環(huán)境下長年累月的使用。如果采用機械伺服天線,上面提到的頻繁切換+頻繁加減速,可能導致以下的問題:
? 機械部件快速疲勞斷裂、滑動磨損、軸承腐蝕;
? 齒輪潤滑失效、電機過熱等現(xiàn)象也會頻發(fā)。
機械伺服天線的后期維護、保養(yǎng),也將是一筆巨大的成本和負擔,嚴重影響產(chǎn)品的推廣。
相比之下,相控陣天線沒有動態(tài)機械部件,具有極高的可靠性,也無需日常維護。
因此,即便某型機械天線的性能參數(shù)滿足低軌衛(wèi)星跟蹤的要求,“可維護性”和“壽命”決定了機械天線在低軌衛(wèi)星終端這種消費電子領域是不可能廣泛應用的。
三、總結:為什么相控陣天線成為低軌終端主流?

四、總結
低軌衛(wèi)星地面終端不采用機械伺服天線,并不僅僅是因為“速度跟不上”,還由于:
? 高頻切換導致的結構疲勞問題;
? 過頂盲區(qū)導致的信號中斷問題;
? 長期運行所需的高可靠性要求;
? 消費電子免維護設計的要求;
? 用戶無縫通信體驗的需求。
相反,相控陣天線憑借無機械運動、精準指向、毫秒級切換速度、長期可靠性等優(yōu)勢,成為低軌地面終端的首選方案。








